Lecture 20
Network Motifs
We have already examined the one node motif of auto-regulation, let’s now explore 3 node motifs.
Let \(n\) be the number of nodes and \(g\) be the number of edges. For a 3 node motif \(n=3\) and the number of edges can vary from 2 all the way to 6.
Random Network
What are our expectations for a random network with \(N\) nodes and \(E\) edges? Let’s try to figure out the expected number of sub-graphs of a particular type, \(\bar{s}\).
Calculate \(\bar{s}\)
First, we need to choose \(n\) nodes from a total of \(N\).
\[\binom{N}{n} = \frac{N!}{n!(N-n)!} \approx \frac{1}{n!}N^n\]Knowing this, what is the probability of choosing the desired edge placements?
\[p \approx \frac{1}{N}\frac{1}{(N-1)!}E(n!) \approx \frac{1}{N^2}n! E \\ \bar{s} = \binom{N}{n}p^g \\ \Rightarrow \bar{s} \approx \left( \frac{En!}{N^2} \right)^g \left(\frac{1}{n!}N^n \right)\]Assuming as \(N\) increases the ratio \(E/N\) remains fixed.
\[\lambda \equiv E/N = \text{constant}\] \[\bar{s} \sim \left( \lambda \frac{1}{N} \right)^g N^n = \lambda^gN^{n-g}\]For a 3 node, \(n=3\) motif this yields the following results.
| g | \(\ \ \ \ \ \bar{s}\) |
|---|---|
| 2 | \(\sim N\) |
| 3 | \(\sim N^0\) |
| 6 | \(\sim N^{-3}\) |
In the case of \(g=3\) the number of sub-graphs does not change \(N\) varies. Two different sub-graphs in this category are the feedback loop and the feedforward loop. In the picture below, the sub-graphs in the center represents a feedback loop and the sub-graph on the right is a feedforward loop.

Compared to the expected number of sub-graphs in a random network, feedforward loops are very much over-represented in E.coli.
Feedforward Loop
There are 8 distinct types of feedforward loops. Half of them are incoherent and the other half are coherent.
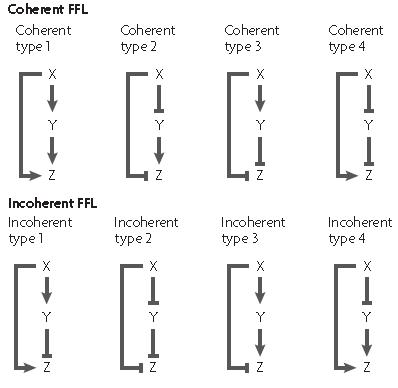
Let’s examine the behavior of the Coherent type 1 loop (C1).
C1 Loop
Assume the concentration of X is quickly turned on at time \(t=0\).
\[y(t) = y^* \left( 1 - e^{-rt} \right) \\ K = y^*\left(1- e^{-r\tau} \right) \\ \Rightarrow \tau = \frac{1}{r} \ln\left(\frac{1}{1-K/y^*} \right)\]AND Logic
Assume that the signals from X and Y combine in an AND logic fashion to create output Z.
- There is a time delay $\tau$ between X turning on and Z turning on.
- There is no time delay between X turning off and Z turning off.
OR Logic
Assume that the signals from X and Y combine in an OR logic fashion to create output Z.
- There is no time delay between X turning on and Z turning on.
- There is a time delay $\tau$ between X turning off and Z turning off.
Time delays between changes in X and changes in Z may be useful for suppressing noise.
Written with StackEdit.